决策树¶
决策树其实有两种类型:
- 分类树:输出为离散的类别标签
- 回归树:输出为具体的数值(例如房价)
以下的「决策树」均表示分类树
下图为一个描述泰坦尼克号上乘客幸存情况的决策树模型:

决策树学习算法的训练数据是一系列形如 \((\vec{x}, Y) = (x_1, x_2, \dots, x_k, Y)\) 的输入,\(\vec{x}\) 为特征向量,\(Y\) 为算法要学习的分类标签。
目标是构建出一颗如上图的决策树,即依据新的 \(\vec{x}\) 能够预测其所属类别 \(Y\)。
决策树的构建过程其实就是集合的划分过程。
以下面的数据为例:
| 年龄 | 有工作 | 有房子 | 信用 | 类别 | |
|---|---|---|---|---|---|
| 0 | 青年 | 否 | 否 | 一般 | 否 |
| 1 | 青年 | 否 | 否 | 好 | 否 |
| 2 | 青年 | 否 | 是 | 好 | 是 |
| 3 | 青年 | 是 | 是 | 一般 | 是 |
| 4 | 青年 | 否 | 否 | 一般 | 否 |
| 5 | 中年 | 否 | 否 | 一般 | 否 |
| 6 | 中年 | 否 | 否 | 好 | 否 |
| 7 | 中年 | 是 | 是 | 好 | 是 |
| 8 | 中年 | 是 | 否 | 非常好 | 是 |
| 9 | 中年 | 是 | 是 | 非常好 | 是 |
| 10 | 老年 | 否 | 是 | 非常好 | 是 |
| 11 | 老年 | 否 | 是 | 好 | 是 |
| 12 | 老年 | 是 | 否 | 好 | 是 |
| 13 | 老年 | 是 | 否 | 非常好 | 是 |
| 14 | 老年 | 否 | 否 | 一般 | 否 |
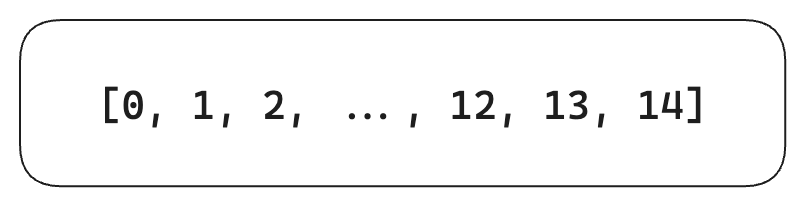
最开始,整颗决策树仅有一个结点即根结点:
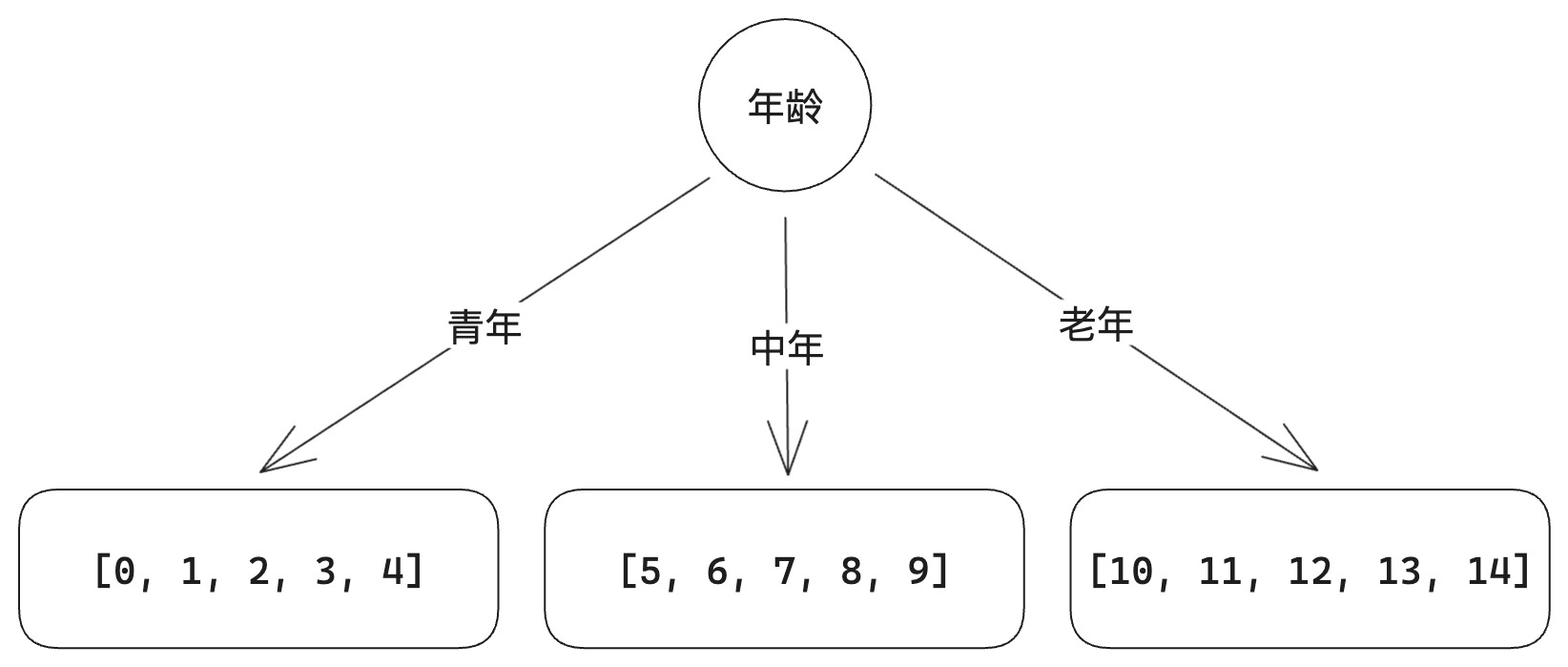
通过将根结点划分为子集,可以细化决策树:
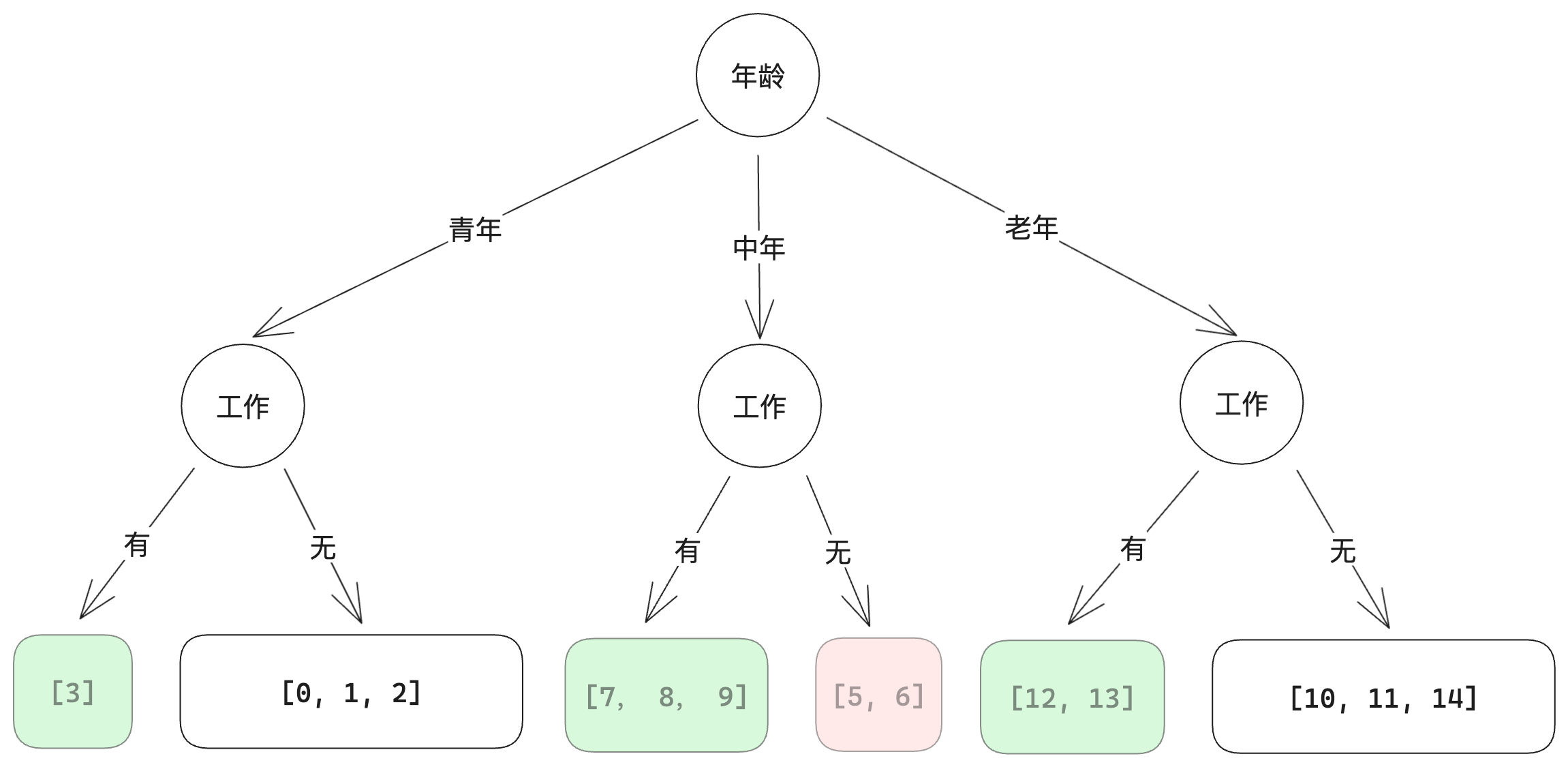
继续划分,直至某一个节点中只包含一个类别的样本(下面这一步带颜色的节点即不可再分):
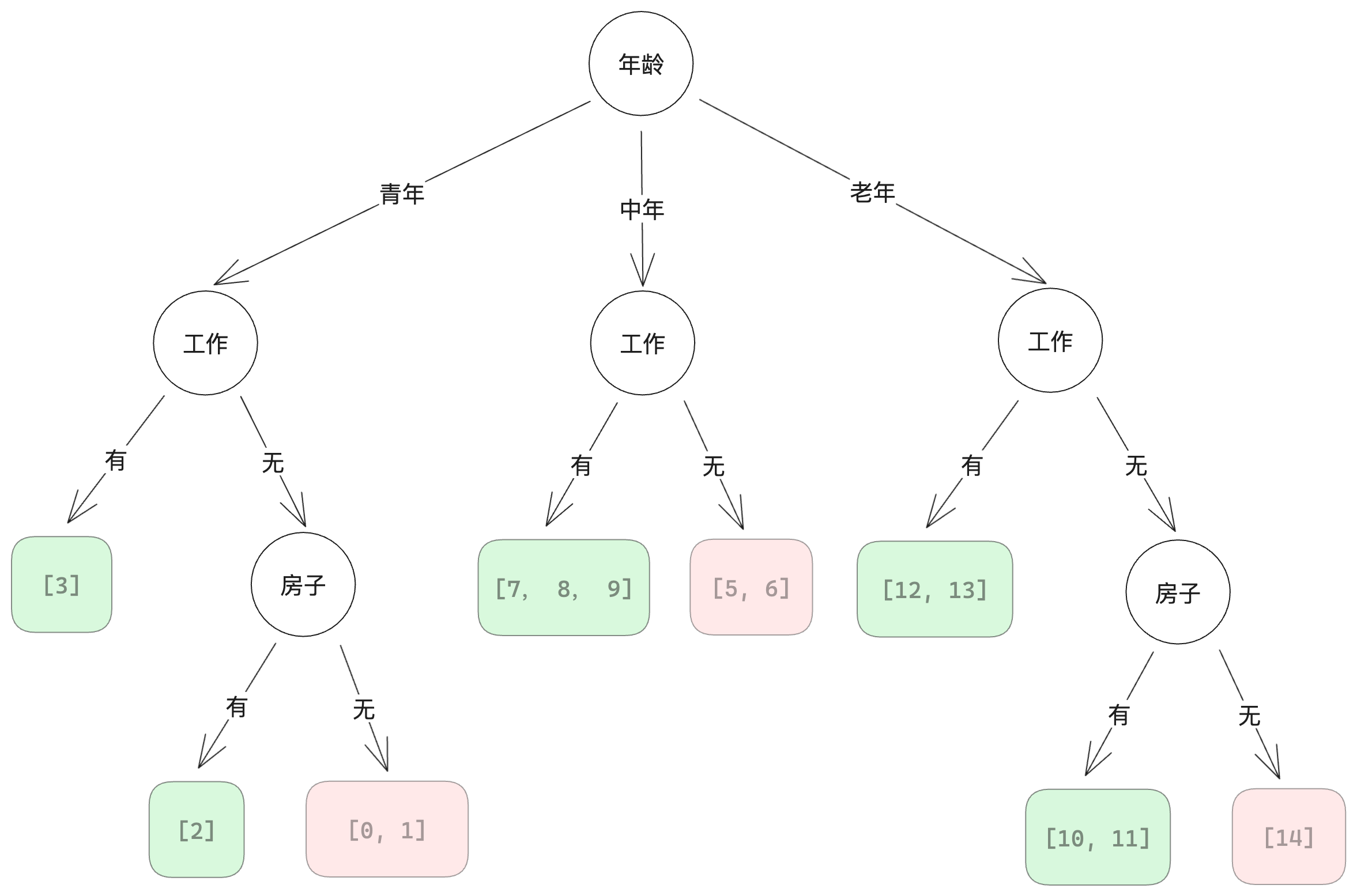
继续划分直至不可再分,得到最终的决策树:
The recursion is completed when the subset at a node has all the same values of the target variable, or when splitting no longer adds value to the predictions.
上述过程即 CLS 算法。
ID3 算法1¶
不过很显然对于 CLS 算法,其产生的决策树的层数可能过多,其选择的特征可能对于「决策」“没有任何帮助”。
于是引入一个 信息增益(Information gain)2 的概念,它是信息学中的概念,表示了选择某一个特征能够获取的“信息量”。
在信息学中存在一个概念来衡量“信息量”,即 信息熵,它表示着“不确定度”,某一事件 \(a_i\) 的信息熵定义如下: $$ H(a_i) = - p(a_i) \log_2{p(a_i)} $$ 而对于某一随机变量 \(X\),若 \(P(X = x_i) = p_i\),则此随机变量的信息熵定义如下: $$ H(X) = -\sum_{i}^{n}p_i\log_2{p_i} $$ 选取某一特征 \(A\) 产生的 信息增益 即 \(D\) 的信息熵在“得知 \(A\) 的各个取值情况下的信息”的条件下,其信息熵减少了多少: $$ g(D, A) = H(D) - H(D | A) $$ 此处引入 条件熵 的概念,设 \(A\) 有 \(m\) 种取值 \(a_1, a_2, \dots, a_m\),那么上式中的 条件熵 \(H(D|A)\) 即为: $$ H(D|A) = \sum_{i}^m P(A=a_i) \cdot H(D|A=a_i) $$ ID3 算法通过每次选取 信息增益 最大的特征来构建决策节点,来优化决策树的层数。
但是它存在一个问题,它会倾向于挑选取值可能更多的特征,试想某一特征为一种“编号”,它的信息增益极大,但基于这样的信息构建出的决策树其实泛化能力并不强。
进而产生了 C4.5 算法对其进行了改善。
C4.5 算法3¶
信息增益率¶
与 ID3 算法相比,依据 信息增益率 而非 信息增益 来进行特征选取。
信息增益率 即 信息增益 与此特征本身 信息熵 的比值,即正则化后的 信息增益,对 ID3 算法的问题进行了矫正: $$ g_R(D, A) = \frac{g(D, A)}{H(A)} $$